Newsletter DPT Nro. 31
ISSN 2618-236X
Noviembre/ 2018
Un brazo protésico con percepción táctil
Aporte para proporcionar al cerebro información sobre el entorno y alarma contra eventuales daños
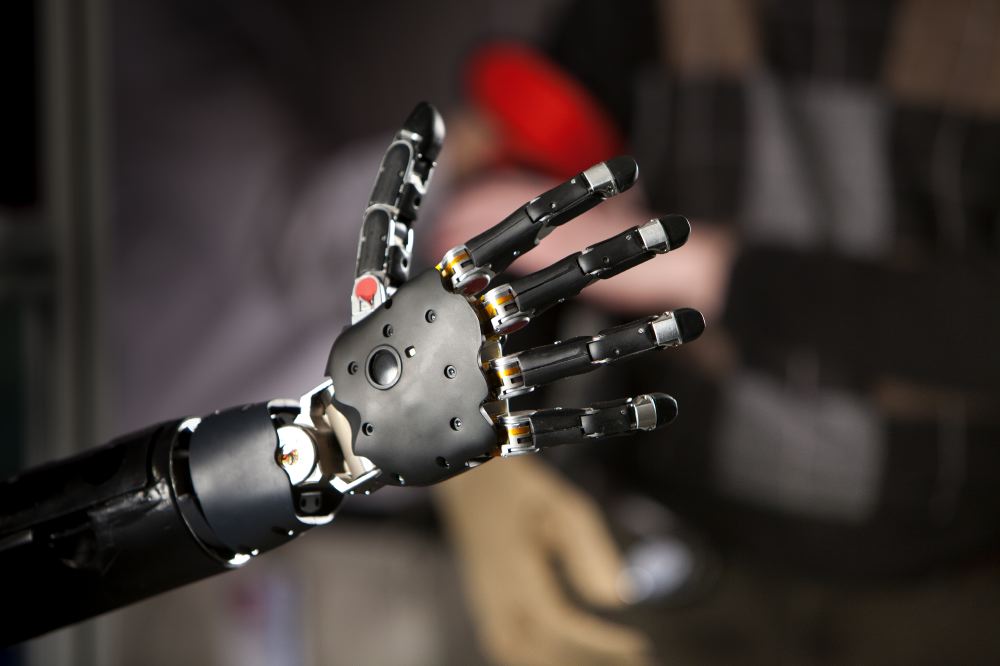
Si bien los avances en materia de prótesis facilitan notoriamente la recuperación de funciones perdidas, los dispositivos suelen carecer de percepción táctil. Ello representa una relevante limitación, dado que las percepciones de tacto y de dolor proporcionan al cerebro valiosa información sobre nuestro entorno, así como alarmas de protección contra eventuales daños a nuestro cuerpo.
Un equipo de investigadores de la Johns Hopkins University ha construido una prótesis de miembro superior que puede activar sensaciones táctiles. Para ello está dotada de una “piel electrónica” (“e-dermis”) formada por varias capas de materiales piezoresistivos y conductivos que reaccionan ante deformaciones mecánicas. Se logra así replicar información táctil neuromórfica mediante mecanoreceptores y nociceptores.
A través de la estimulación nerviosa eléctrica transcutánea (TENS) con personas con manos amputadas, el equipo determinó y cuantificó los parámetros de estimulación para obtener percepciones táctiles inocuas (no dolorosas) y nocivas (dolorosas). La e-dermis desarrollada -inspirada biológicamente- permite al usuario de la prótesis percibir un espectro continuo desde el tacto inocuo hasta el tacto nocivo a través de una interfaz neuromórfica que produce actividad neuronal en forma de receptor.
Para convertir información de presión en señales eléctricas similares a los potenciales de acción de las neuronas (mediante electro-estimuladores conectados a los nervios del antebrazo del paciente) fue necesario mapear en detalle cómo los nervios periféricos del muñón residual se corresponden con distintas sensaciones del miembro amputado.
Fuente: “Prosthesis with neuromorphic multilayered e-dermis perceives touch and pain”. Luke E. Osborn, Andrei Dragomir, Joseph L. Betthauser, Christopher L. Hunt, Harrison H. Nguyen, Rahul R. Kaliki and Nitish V. Thakor. Science Robotics, 20 Jun 2018: Vol. 3, Issue 19, eaat3818, DOI: 10.1126/scirobotics.aat3818