Newsletter DPT Nro. 33
ISSN 2618-236X
Enero / 2019
Otros aportes innovadores
Milirrobot versátil
Puede caminar, arrastrarse, saltar, nadar y bucear en entornos complejos
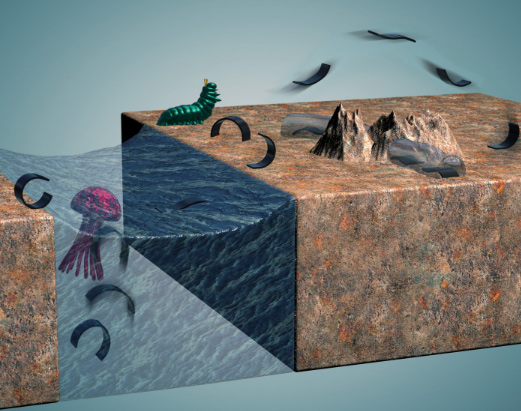
Científicos del Instituto Max Planck para Sistemas Inteligentes en Stuttgart han desarrollado un robot minúsculo y flexible cuyo accionamiento magnético le permite caminar, arrastrarse y rodar a través de terrenos difíciles, nadar y bucear, saltar obstáculos, así como tomar y transportar pequeñas cargas para depositarlas en ubicaciones definidas.
Se trata de tiras de silicona elástica con micropartículas magnéticas incrustadas, que son construidas remedando la mecánica del movimiento de organismos biológicos de cuerpo blando (tales como medusas, larvas, orugas o espermatozoides). Un perfil de magnetización definido con precisión permite operar y controlar al milirrobot utilizando un campo magnético externo con magnitud y dirección variables.
Si bien aún deben superarse grandes desafíos antes de poder utilizar milirrobots en pacientes (por ejemplo, demostrar que pueden controlarse dentro del cuerpo humano), se prevé que este tipo de robots podrían transportar medicamentos específicamente hacia los órganos o tejidos donde se requieren. Se utilizarían en procedimientos médicos mínimamente invasivos, en los que el paciente ingeriría los milirrobots o se introducirían en su cuerpo a través de una pequeña abertura en la piel.
El Departamento de Inteligencia Física (Physical Intelligence Department) asigna alta relevancia a la investigación sobre el posible uso de mili, micro y nano robots móviles, con la expectativa de abrir nuevas perspectivas de diagnóstico y tratamiento de enfermedades, así como en técnicas quirúrgicas que hoy no son posibles.
Fuente: Max Planck Society, Max Planck Institute for Intelligent Systems: “Millirobot with a talent for versatility of movement: A magnetic drive allows a tiny untethered vehicle to walk, crawl, jump and swim through a complex environment”. Max-Planck-Gesellschaft, 30/01/2018