Newsletter DPT Nro. 76
ISSN 2618-236X
Septiembre / 2022
NOTICIAS CIENTIFICAS
NOTICIAS CIENTIFICAS INTERNACIONALES
Dispositivos implantables temporarios y biodegradables
Posibilidades y perspectivas
La actual investigación multidisciplinaria del equipo liderado por John A. Rogers en la Northwestern University (Evanston, Illinois, EE.UU.) se centra en el desarrollo de aplicaciones bioinspiradas y biointegradas mediante estructuras electrónicas, nanofotónicas, dispositivos microfluídicos y sistemas microelectromecánicos (*).
La presente reseña comprende tres (3) artículos provenientes de dicho equipo. El primero (1) trata sobre un marcapasos temporario biodegradable que se diluye y reabsorbe cuando ya no resulta necesario. En el segundo (2) se describe un implante electrónico blando que “enfría” el dolor. En el tercero (3) se presenta un minicrustáceo robótico que puede doblarse, retorcerse, arrastrarse, andar y saltar.
(*) Rogers Research Group. Northwestern University, 2022.
1.- Primer artículo: Un marcapasos transitorio inteligente que se desintegra, disuelve y reabsorbe cuando deja de ser necesario (1.1.) (1.2.) (1.3.)
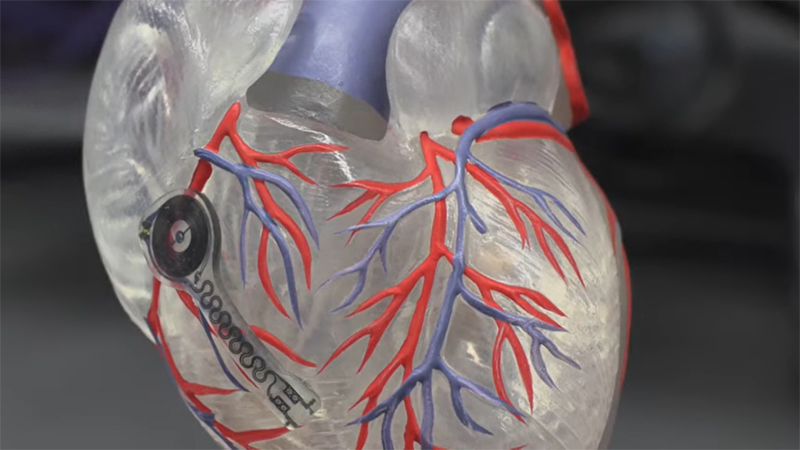
Un marcapasos transitorio tiene una variedad de usos potenciales; por ejemplo, para pacientes que acaban de someterse a una cirugía cardíaca y requieren marcapasos temporal, en aquellos que están esperando un dispositivo más permanente y en recién nacidos que requieren marcapasos temporal hasta que el propio corazón comience a funcionar normalmente. Los dispositivos convencionales implican riesgos de infección, limitaciones en la movilidad del paciente y requieren extracción quirúrgica.
En el artículo aquí reseñado el equipo liderado por Rogers, en la Northwestern University, presenta un sistema de circuito cerrado desarrollado con base en un primer marcapasos inalámbrico temporario -anunciado originariamente por el equipo en 2021- que se disuelve y biorreabsorbe en el cuerpo cuando ya no es necesario. El actual dispositivo se integra en una red de 4 sensores inalámbricos flexibles para: (a) monitorear continuamente diversos parámetros fisiológicos (temperatura corporal, niveles de oxígeno, respiración, tono muscular, actividad física y actividad eléctrica del corazón), (b) alertar al paciente -mediante retroalimentación háptica- sobre eventuales problemas (mal funcionamiento, batería baja), con diferentes series de vibraciones, y (c) permitir a los médicos monitorear a sus pacientes accediendo de forma remota a los datos provenientes de los sensores.
El líder del equipo de investigación -John Rogers- señaló: “Esta es la primera vez que combinamos dispositivos electrónicos portátiles con plataformas electrónicas transitorias”. “Este enfoque podría cambiar la atención de pacientes al proporcionar un control de circuito cerrado multinodal sobre los procesos fisiológicos esenciales, a través de una red inalámbrica de sensores y estimuladores que operan de una manera inspirada en los complejos circuitos de retroalimentación biológica de los organismos vivos”.
2.- Segundo artículo: Un implante electrónico blando que “enfría” el dolor (2.1.) (2.2.)
El tratamiento del dolor es un problema acuciante para muchas personas que, a menudo, deben recurrir a medicamentos analgésicos o a opiáceos adictivos. Pero, en algunos casos, es suficiente aplicar frío en el lugar del dolor. Si bien el enfriamiento local resulta eficaz para eliminar señales de dolor, el uso de tecnologías tradicionales estuvo limitado por el volumen y rigidez de los dispositivos, así como por la imprecisión en la localización y magnitud del enfriamiento.
En el artículo aquí reseñado, el equipo de investigadores liderado por Rogers -en la Northwestern University- presenta un dispositivo microfluídico flexible, miniaturizado, implantable y biorreabsorbible que entrega energía de enfriamiento mínimamente invasiva y focalizada en diversas profundidades en tejidos vivos con control de retroalimentación de temperatura en tiempo real. Su construcción con materiales biocompatibles solubles en agua conduce a la disolución y biorreabsorción del dispositivo una vez que deja de ser necesario, sin cirugías adicionales. Los ensayos in vivo en modelos de rata para el dolor neuropático, durante varias semanas, demuestran la capacidad de enfriar de forma rápida y precisa los nervios periféricos para proporcionar analgesia local bajo demanda. Se trata de un sistema híbrido -microfluídico y electrónico- para enfriar y medir simultáneamente la temperatura del nervio.
El equipo utiliza un sistema de transición de fase líquida a gaseosa, dentro de canales microfluídicos, en una banda elástica que envuelve los nervios periféricos para proporcionar un enfriamiento preciso y dirigido que los adormece y bloquea las señales de dolor, evitando que lleguen al cerebro. Un sensor térmico de película fina integrado permite controlar la temperatura en tiempo real. Respecto de los diminutos canales microfluidicos, un canal contiene refrigerante líquido (perfluoropentano) y otro contiene nitrógeno seco (un gas inerte). Cuando el líquido y el gas concurren en una cámara compartida, se produce una reacción que hace que el líquido se evapore rápidamente. Simultáneamente, un pequeño sensor integrado controla la temperatura del nervio para garantizar que no se enfríe demasiado, lo que podría causar daños en los tejidos. Una bomba externa permite al usuario activar el sistema y graduar su intensidad. Los investigadores prevén que este dispositivo podrá usarse, por ejemplo, en pacientes que se someten a cirugías rutinarias o incluso a amputaciones. Los cirujanos podrían colocar el implante durante la intervención para ayudar a controlar el dolor postoperatorio.
3.- Tercer artículo: Minicangrejo robótico: Puede doblarse, retorcerse, arrastrarse, gatear, andar y saltar (3.1.) (3.2.) (3.3.)
En el artículo aquí reseñado el equipo de investigadores liderado por Rogers -en la Northwestern University- describe un minúsculo cangrejo robótico (de 0,55 mm de ancho) que puede doblarse, retorcerse, arrastrarse, andar, e incluso saltar siguiendo comandos de laboratorio. Si bien se trata de una primera aproximación a sus posibilidades, su tecnología podría impulsar nuevas soluciones en microrrobótica para medicina de precisión, entre otros campos.
Respecto de la utilidad práctica de estos diminutos crustáceos robóticos, Rogers señala: “Podríamos imaginar a los microrrobots como agentes para reparar o montar pequeñas estructuras o como asistentes quirúrgicos para limpiar arterias obstruidas, detener hemorragias internas o eliminar tumores cancerosos, todo ello mediante procedimientos mínimamente invasivos”. El diminuto robot no requiere energía ni batería. Su movimiento se basa en la resistencia elástica de su cuerpo y en el material maleable con memoria de forma con el que se fabrica. Recupera su forma inicial cuando se calienta y la pierde cuando se enfría, generando un movimiento útil. Para hacer efectivo ese movimiento, se utiliza un rayo láser que calienta rápidamente las distintas partes del robot para que avance en una determinada dirección, se doble, gire o salte en formas tridimensionales definidas con precisión.
El equipo desarrolla también robots con otras formas (además del cangrejo), como orugas, grillos o escarabajos. “Con estas técnicas de ensamblaje y conceptos de materiales, podemos construir robots andantes de casi cualquier tamaño o forma en 3D”, aseguró Rogers. En este caso “Los estudiantes se sintieron inspirados por los movimientos de arrastre lateral de los diminutos cangrejos. Fue un “capricho creativo”.
Referencias:
(1.1.) Fuente primaria: “A transient, closed-loop network of wireless, body-integrated devices for autonomous electrotherapy” Yeon Sik Choi, Hyoyoung Jeong, Rose T. Yin, Raudel Avila, Anna Pfenniger, Jaeyoung Yoo, Jong Yoon Lee, Andreas Tzavelis, Young Joong Lee, Sheena W. Chen, Helen S. Knight, Seungyeob Kim, Hak-Young Ahn, Grace Wickerson, Abraham Vázquez-Guardado, Elizabeth Higbee-Dempsey, Bender A. Russo, Michael A. Napolitano, Timothy J. Holleran, Leen Abdul Razzak, Alana N. Miniovich, Geumbee Lee, Beth Geist, Brandon Kim, Shuling Hanjaclyn, A. Brennan, Xkedar Aras, Sung Soo Kwak, Joohee Kim, Emily Alexandria Waters, Xiangxing Yang, Amy Burrellkeum, San Chun, Claire Liu, Xchangsheng Wualina Y, Rweialisha N. Spann, Anthony Banks, David Johnson, Zheng Jenny Zhang, Chad R. Haney, Sung Hun Jin, Alan Varteres Sahakian, Yonggang Huang, Gregory D. Trachiotis, Bradley P. Knight, Rishi K. Arora, Igor R. Efimov, and John A. Rogers. Science. Vol 376, Issue 6596 pp. 1006-1012. Biomedicine. 26 May 2022. DOI: 10.1126/science.abm1703
(1.2.) Fuente secundaria 1: “Dissolving Pacemaker Communicates with Patient and Wearable Tech” Medgadget. June 4th, 2022
(1.3.) Fuente secundaria 2: “Crean un marcapasos que se disuelve en el cuerpo una vez que termina su función” Ingeniería Biomédica. Jun 16, 2022
(2.1.) Fuente primaria: “Soft, bioresorbable coolers for reversible conduction block of peripheral nerves”. Jonathan T. Reeder, Zhaoqian Xie, Xquansan Yang, Min-Ho Seo, Ying Yan, Yujun Deng, Katherine R. Jinkins, Siddharth R. Krishnan, Claire Liu, Shannon Mckay, Emily Patnaude, Alexandra Johnson, Zichen Zhao, Moon Joo Kim, Yameng Xu, Ivy Huang, Raudel Avila, Christopher Felicelli, Emily Ray, Xu Guo, Wilson Z. Ray, Yonggang Huang, Matthew R. MacEwan, John A. Rogers. Science. Vol 377, Issue 6601. pp. 109-115. 30 Jun 2022. DOI: 10.1126/science.abl8532
(2.2.) Fuente secundaria: “Un implante electrónico blando que ‘enfría’ el dolor”. Boletín SINC. Innovación. 1/7/2022
(3.1.) Fuente primaria: “Submillimeter-scale multimaterial terrestrial robots” Mengdi Han, Xiaogang Guo, Xuexian Chencunman Liang, Hangbo Zhao, Qihui Zhangwubin Bai, Fan Zhang, Heming Wei, Changsheng Wuqinghong Cui, Shenglian Yao, Bohan Sunyiyuan Yang, Xquansan Yang, Yuhang Ma, Zhaoguo Xue, Xjean Won Kwak, Tianqi Jin, Qing Tu, Enming Songziao Tianyongfeng Mei, Daining Fang, Haixia Zhangyonggang Huang, Yihui Zhang, John A. Rogers. Science Robotics. Vol 7, Issue 66. Research Article. Microrobots. 25 May 2022. DOI: 10.1126/scirobotics.abn0602
(3.2.) Fuente secundaria1: “Crean un cangrejo robótico más pequeño que una pulga: es el robot controlado a distancia más pequeño del mundo: puede doblarse, retorcerse, gatear e incluso saltar” Por Sarah Romero. Muy Interesante. 28/05/2022
(3.3.) Fuente secundaria 2: “El robot controlado a distancia más pequeño del mundo podrá eliminar tumores y limpiar arterias” Por Ismael Marinero. El Español. Omicrono. 2 junio, 2022